Projects
Explore my portfolio of projects across different technologies.
A Crack-Detection Wall-Climbing Robot
Mechatronics capstone — an autonomous robot that climbs vertical building surfaces using propeller-based adhesion, streams live images to a Django server, and classifies structural cracks in real time using a TensorFlow model.
┌─────────────┐ I2C ┌─────────────────┐
│ MPU9250 │──────────► │
│ 9-DOF IMU │ │ Arduino Nano │
├─────────────┤ I2C │ │ UART "IMU_roll_pitch_yaw_elev"
│ BMP280 │──────────► │──────────────────────────────────►
│ Altimeter │ └─────────────────┘ │
└─────────────┘ ▼
┌──────────────────┐
│ ESP32-CAM │
│ WiFi + Camera │
└────────┬─────────┘
│
HTTP POST /upload/
filename: IMU_-2.3_88.1_0.0_124.jpg
│
▼
┌────────────────────────┐
│ Django Server │
│ │
│ captured_images/ │
│ │ │
│ AI Thread (5s poll) │
│ TensorFlow Keras │
│ 120×120 RGB │
│ │ │
│ ┌──────┴──────┐ │
│ │ │ │
│crack_images/ no_crack/ │
│ │
│ Bootstrap Gallery │
│ (auto-refresh 2s) │
└────────────────────────┘
The Arduino Nano reads an MPU9250 (roll, pitch, yaw) and a BMP280 (relative altitude). Orientation uses a complementary filter — gyroscope integration corrected by the accelerometer on every tick.
// Complementary filter — blends gyro integration with accel-derived angle
const float alpha = 0.96f;
roll = alpha * lastRoll + (1.0f - alpha) * accelRoll;
pitch = alpha * lastPitch + (1.0f - alpha) * accelPitch;
Every 2 seconds, the Arduino formats all four values into a single UART string and sends it to the ESP32-CAM:
IMU_<roll>_<pitch>_<yaw>_<elevation>
Example: IMU_-2.3_88.1_0.0_124
Rather than making a separate API call for metadata, the sensor string becomes the JPEG filename. The ESP32-CAM captures a frame and POSTs it with that name:
POST /upload/ HTTP/1.1
Content-Type: multipart/form-data; boundary=dataMarker
--dataMarker
Content-Disposition: form-data; name="imageFile";
filename="IMU_-2.3_88.1_0.0_124.jpg"
Content-Type: image/jpeg
[JPEG binary — streamed in 1024-byte chunks]
Django's gallery view recovers the sensor values with a single split — no database joins needed:
def parse_image_data(filename):
data = filename.replace('IMU_', '').replace('.jpg', '').split('_')
return {
'roll': float(data[0]),
'pitch': float(data[1]),
'yaw': float(data[2]),
'elevation': float(data[3])
}
A TensorFlow inference thread starts automatically when Django boots — no manual management needed:
# apps.py — fires once on startup
class CameraAppConfig(AppConfig):
def ready(self):
import os
if os.environ.get('RUN_MAIN', None) != 'true':
thread = threading.Thread(target=ai_monitoring.start_monitoring)
thread.daemon = True
thread.start()
The monitoring loop runs every 5 seconds:
captured_images/*.jpg
│
▼ ImageDataGenerator(rescale=1./255)
│ flow_from_dataframe(target_size=(120,120), color_mode='rgb')
│
▼ model.predict()
│
├── score > 0.5 ──► crack_images/
└── score ≤ 0.5 ──► no_crack_images/
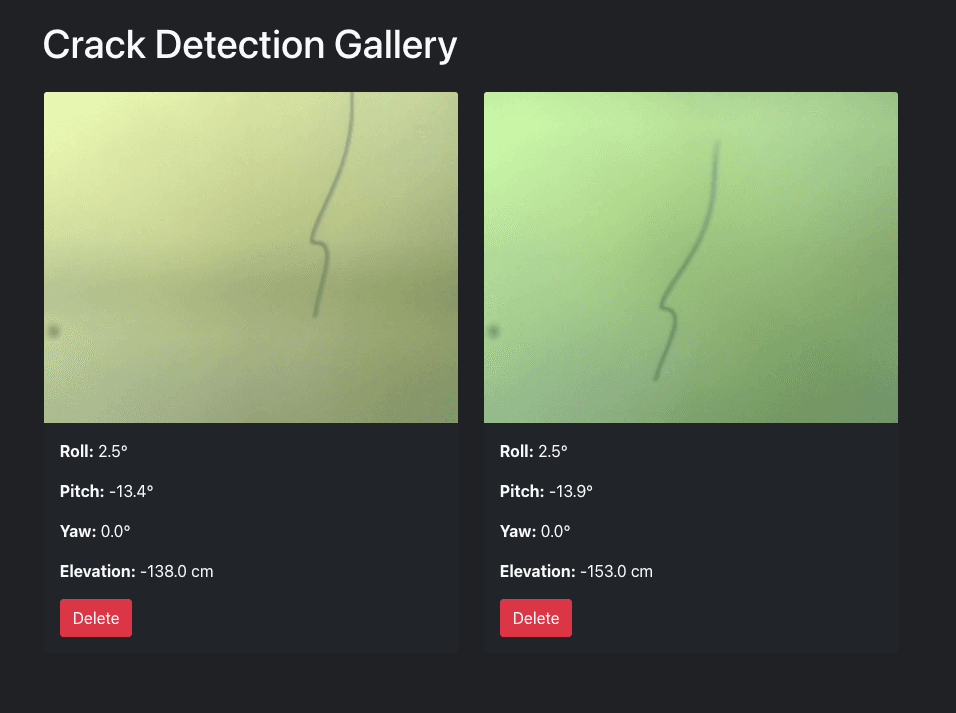
The frontend auto-refreshes without WebSockets: jQuery polls /count-photos/ every 2 seconds and re-fetches the HTML fragment only when the count changes. Each card renders all four sensor fields parsed from the filename.
Before finalizing hardware gains, I simulated the wall-angle transition (0° horizontal → 90° vertical) in Python. The controller output scales motor thrust based on angle error.
class WallCrawlerController:
# Robot: 650 g, friction μ = 0.6, max thrust = 13 N
def calculate_required_thrust(self, angle_deg):
angle = np.radians(angle_deg)
mg = self.mass * self.g
return mg * np.sin(angle) * np.sqrt(1 + self.friction_coef**2) * 1.2
Simulation results — four gain combinations:
| Kp | Ki | Kd | Steady-State Error |
|---|---|---|---|
| 1.8 | 0.12 | 0.35 | 4.43° |
| 2.0 | 0.10 | 0.40 | 4.23° |
| 1.5 | 0.08 | 0.30 | 4.48° |
| 1.2 | 0.05 | 0.25 | 4.35° |
| Part | Role |
|---|---|
| Arduino Nano | Sensor reading + UART trigger |
| MPU9250 | Roll / pitch / yaw (9-DOF IMU) |
| BMP280 | Relative altitude in cm |
| ESP32-CAM | JPEG capture + WiFi HTTP POST |
| Propeller motors | Negative-pressure wall adhesion |
| Drive motors | Directional movement on surface |